W18 <<
Previous Next >> Collaborative flowchart
Sensor
sensor file link
完成品:
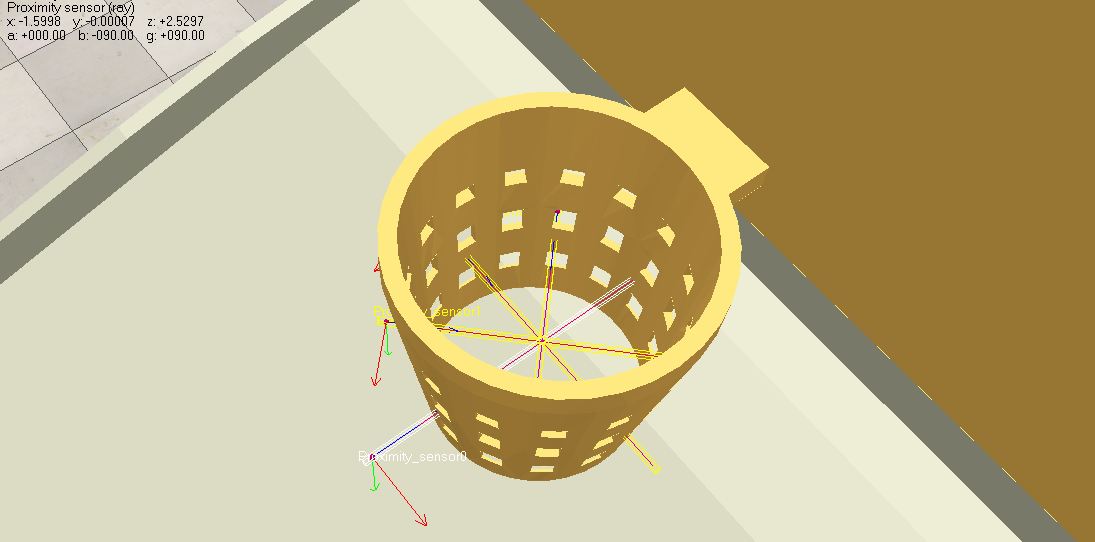
這是紅球的內部狀況
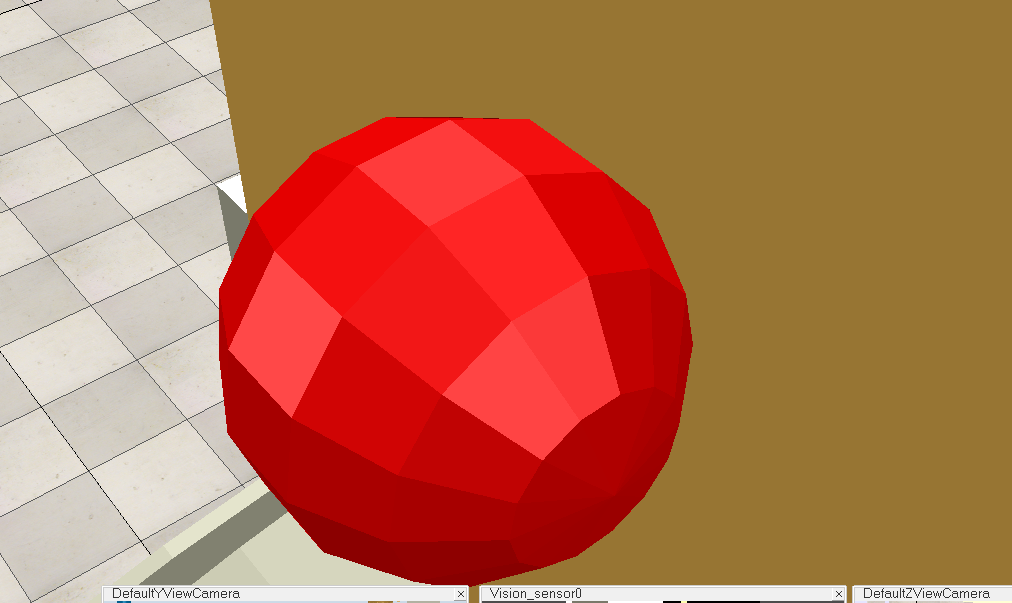
裡面放一顆較小的綠球,因為紅球太大顆會導致感測器失靈,所以讓感測器去感測綠球就不會有這個問題
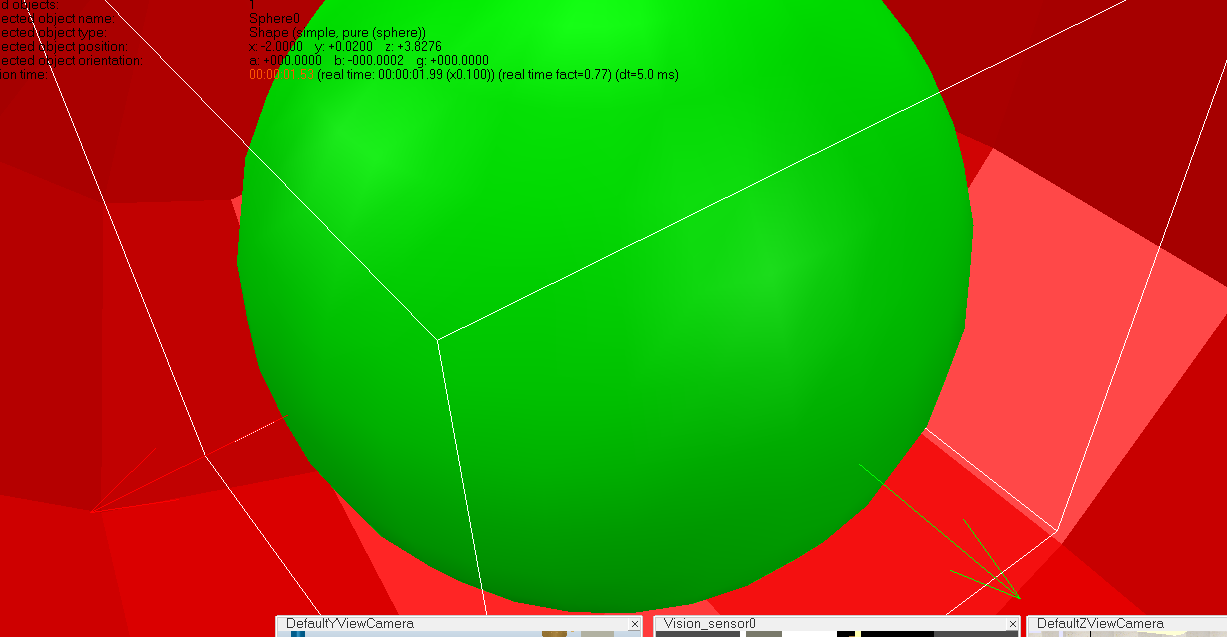
感測器放了四根,呈現八角形讓感測器可以比較容易感測球
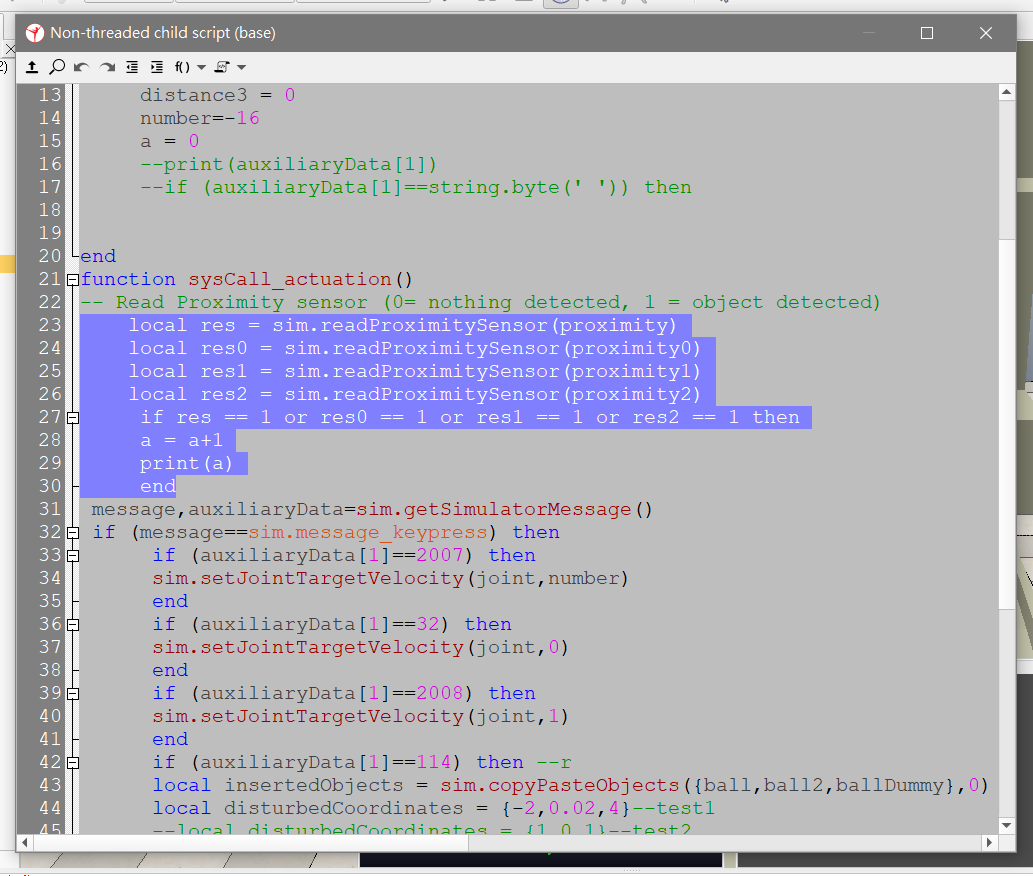
當綠球觸碰到res、res0、res1抑或是res2
那麼就會顯示1分
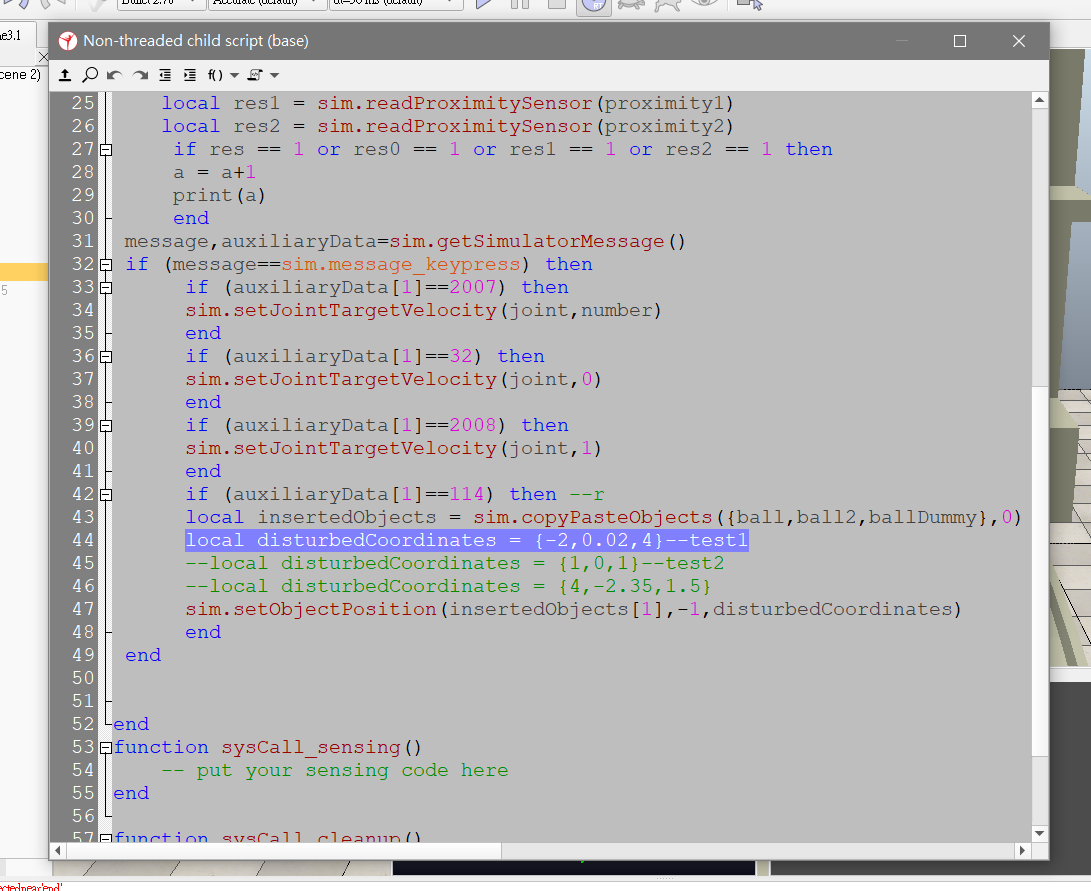
這段程式是為了在製作感測器時能夠方便檢測,所以讓球重生再籃框上的位置
W18 <<
Previous Next >> Collaborative flowchart