組合圖-5.stl|主體-5.stl|軸承-5.stl
發球機-5.ttt
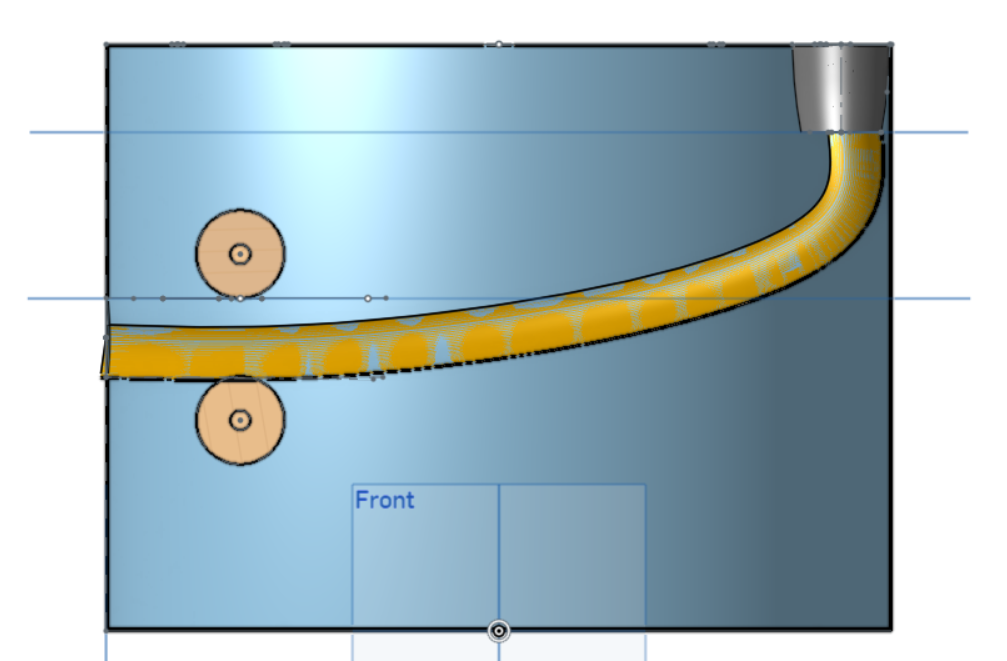
我們將發球機的軌道移到後面,不過跟第4個版本一樣球和圓盤無法將球正確的引至發球軌道上
我認為是球、圓盤、球桶的設定沒有設定好
Copyright © All rights reserved | This template is made with by Colorlib