2.4 <<
Previous Next >> Error exclude
ssh
ssh建立:
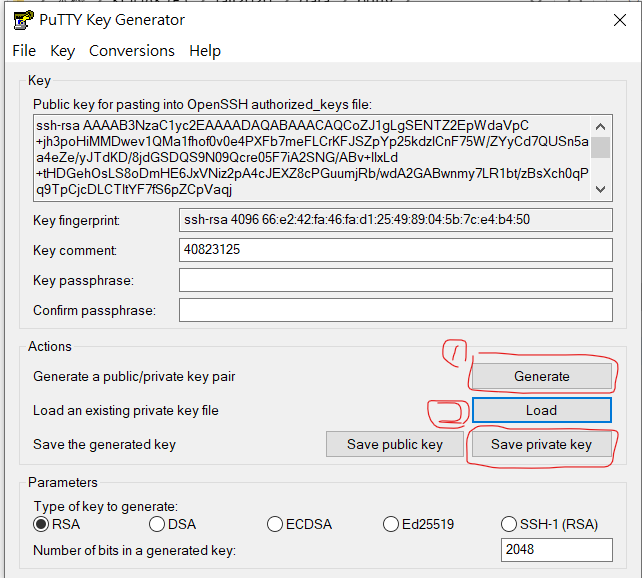
建立公鑰(public key)
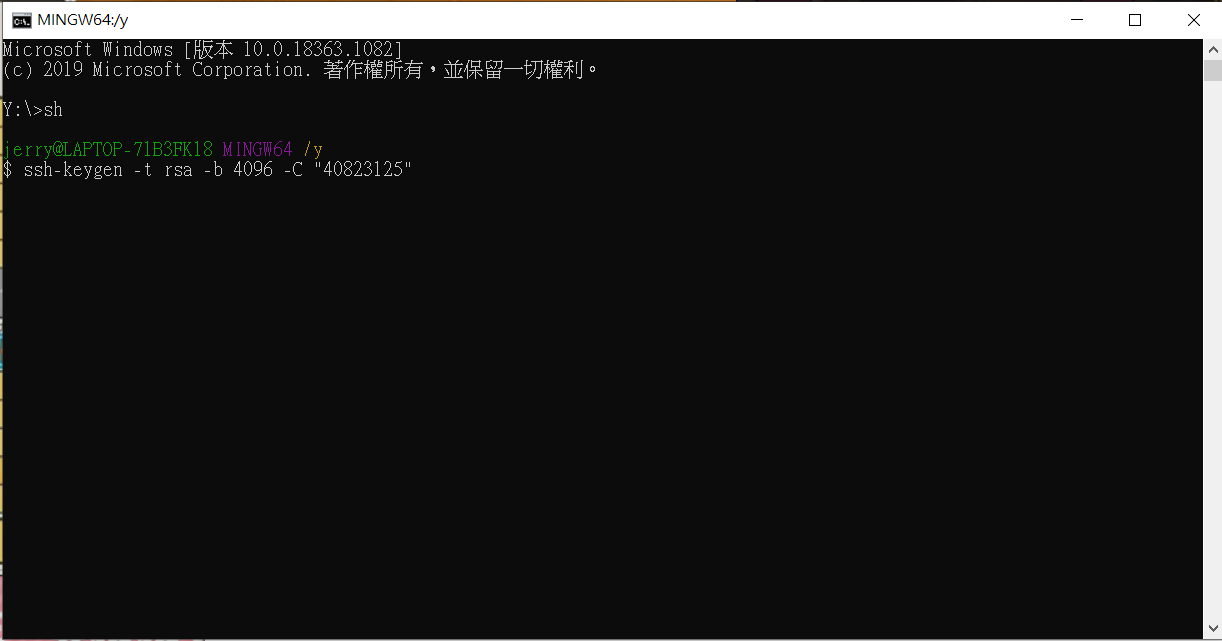
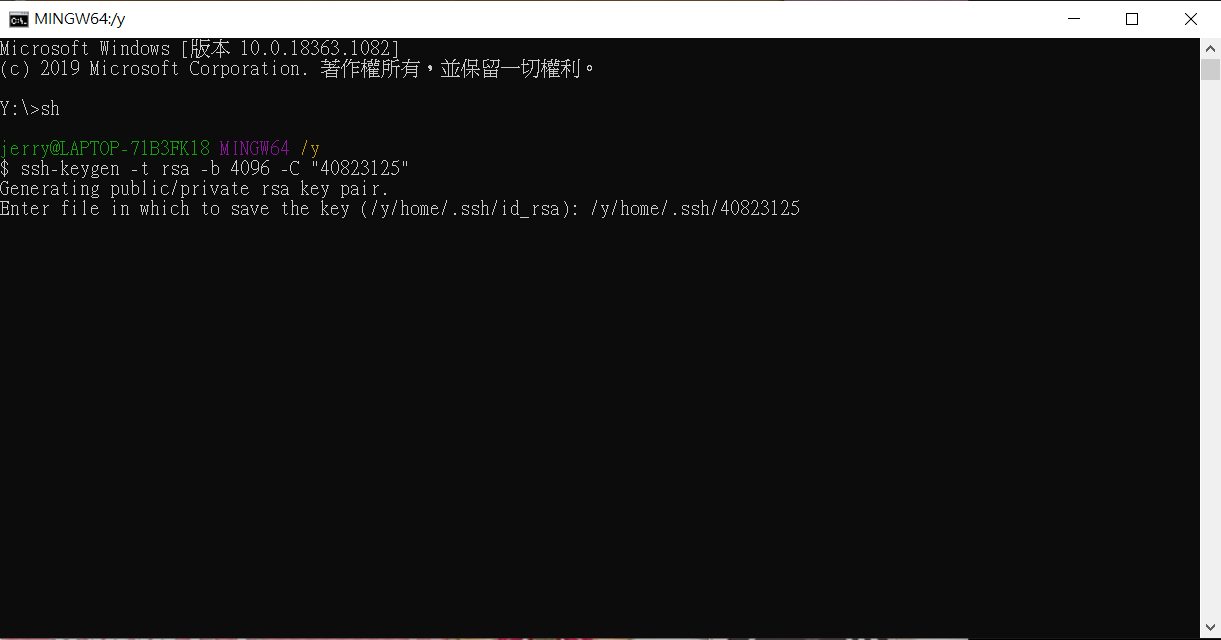
設定儲存路徑
|
1
|
/y(目錄名)/home(資料夾名稱)/.ssh(創建的資料夾名稱)/40823125(創建的檔案名)
|
載入
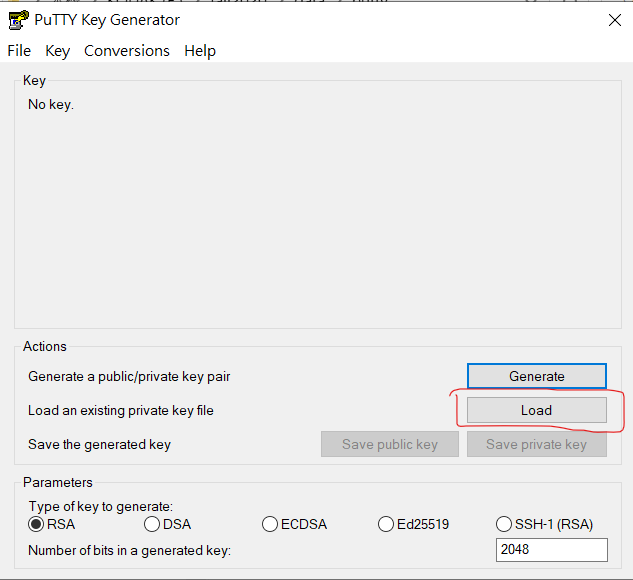
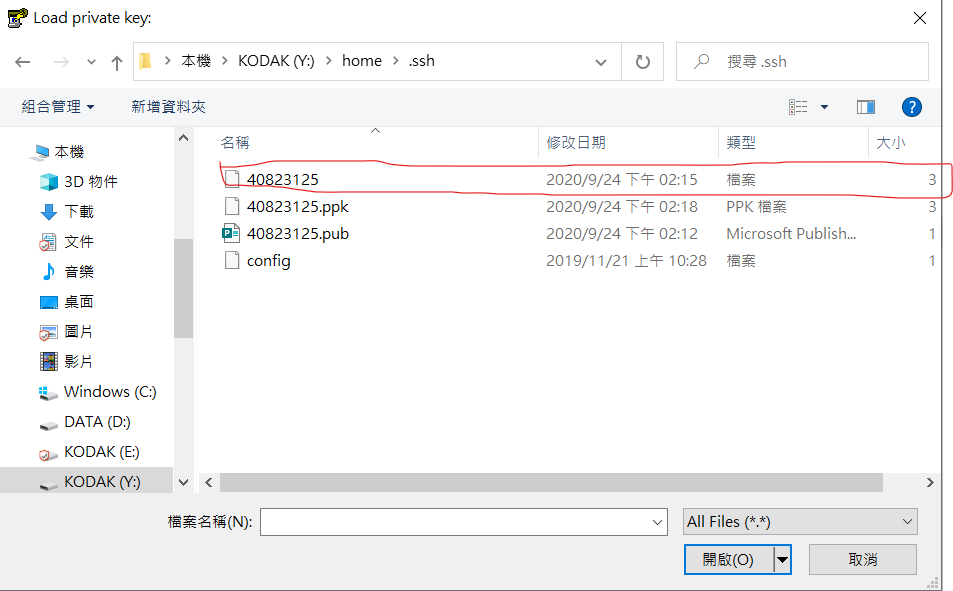
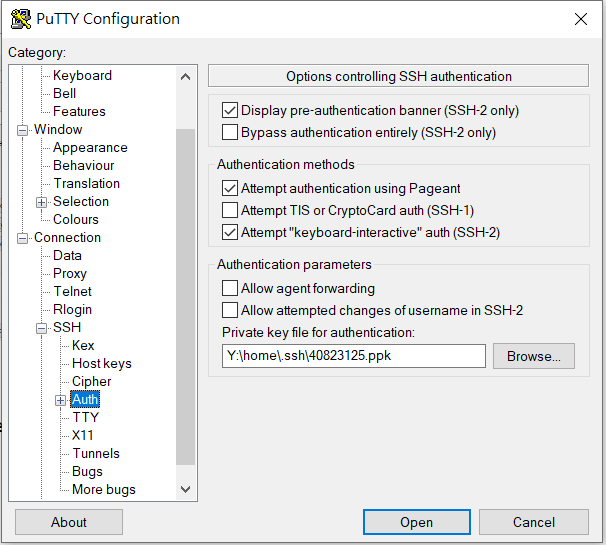
創建密鑰(private key)(ppk檔)
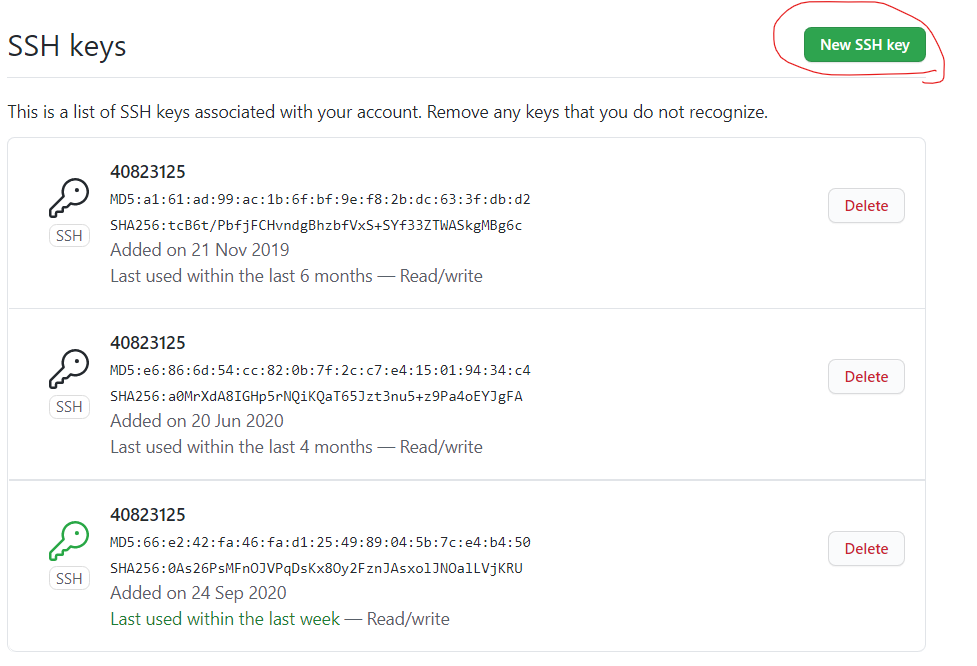
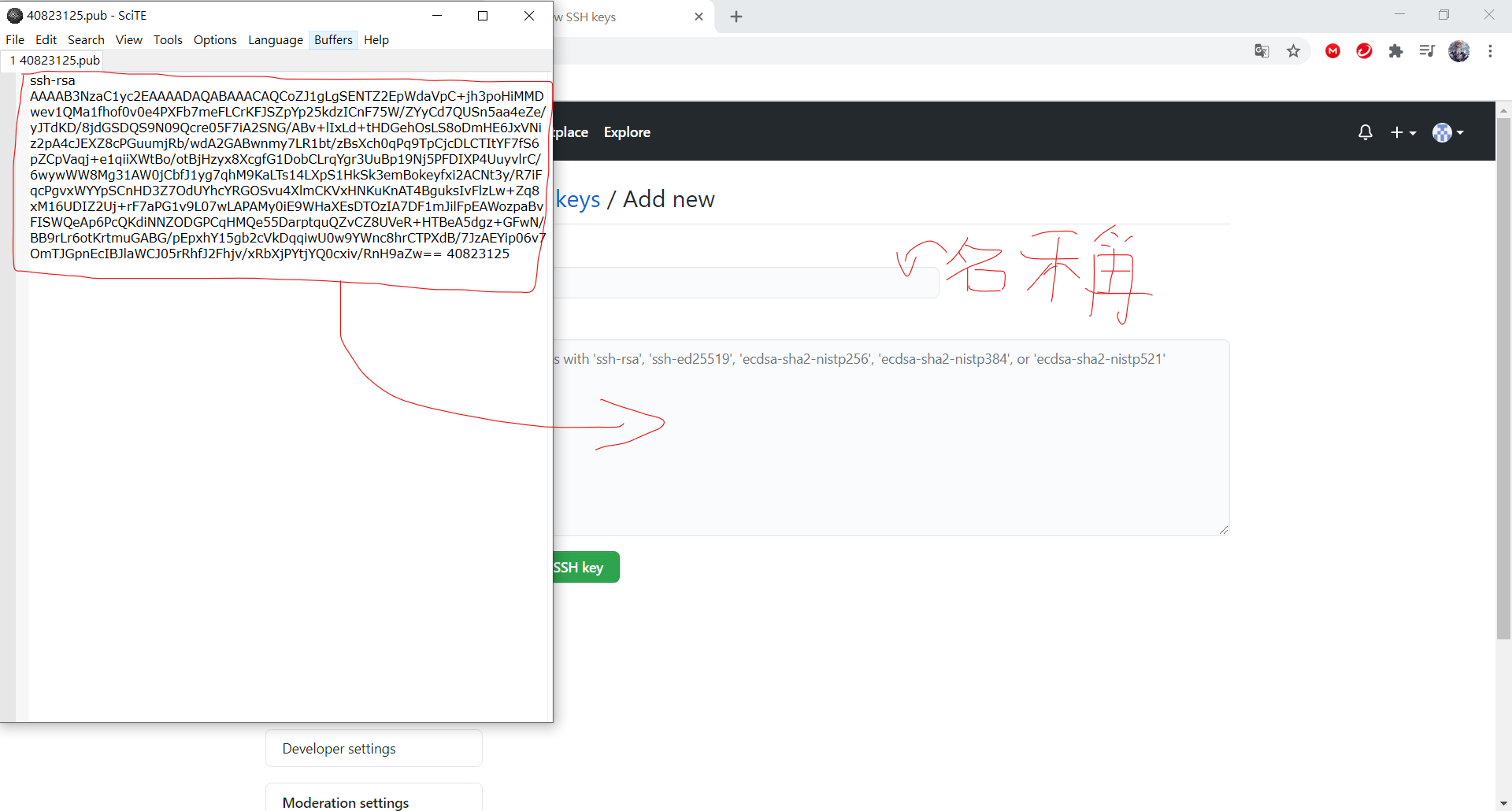
設定github ssh key
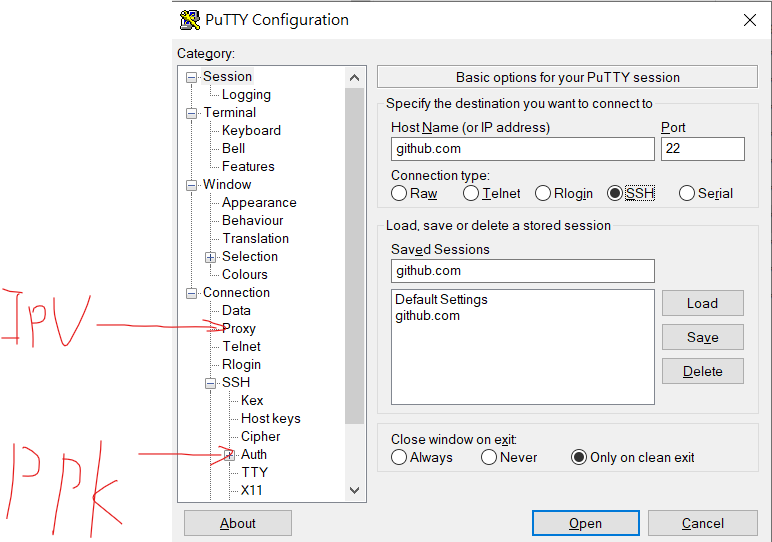
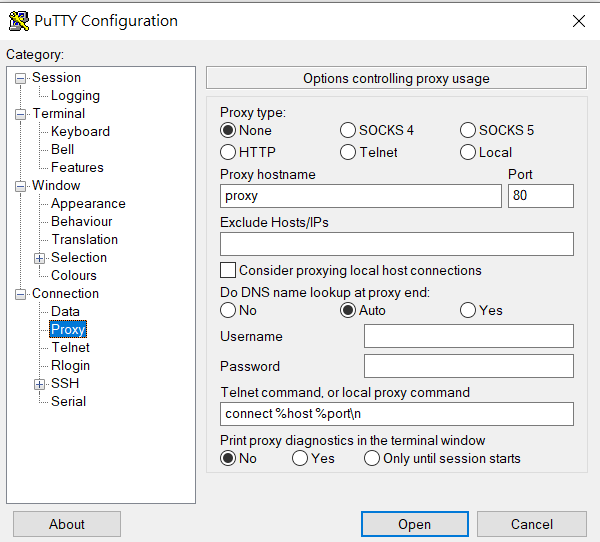
設定putty
加入到.ssh中取名為config
|
1
2
3
4
5
6
7
8
9
|
ProxyCommand y:/putty/plink.exe github.com %h %p
Host github.com
User git
Port 22
Hostname github.com
TCPKeepAlive yes
IdentitiesOnly yes
|
將cad2020中.git目錄下的config改為
|
1
2
|
#url = https://github.com/40823125/cad2020.git
url = git@github.com:40823125/cad2020.git
|
2.4 <<
Previous Next >> Error exclude